In a recently completed project, RAICo took the first steps towards creating a sharp object detection system to help prevent damage to robot manipulators in golveboxes.
The team began by developing a realistic representation of a through-gloveport robotic system at RAICo1. Although the setup was technology agnostic, it included mirroring elements of Sellafield’s RrOBO (Risk Reduction of Glovebox Operations) system to ensure reflection of real-world problems. The project presented many challenges, one of which was Sellafield’s use of external camera on the RrOBO system, which meant there was no fixed relationship between the camera and the manipulator’s position.
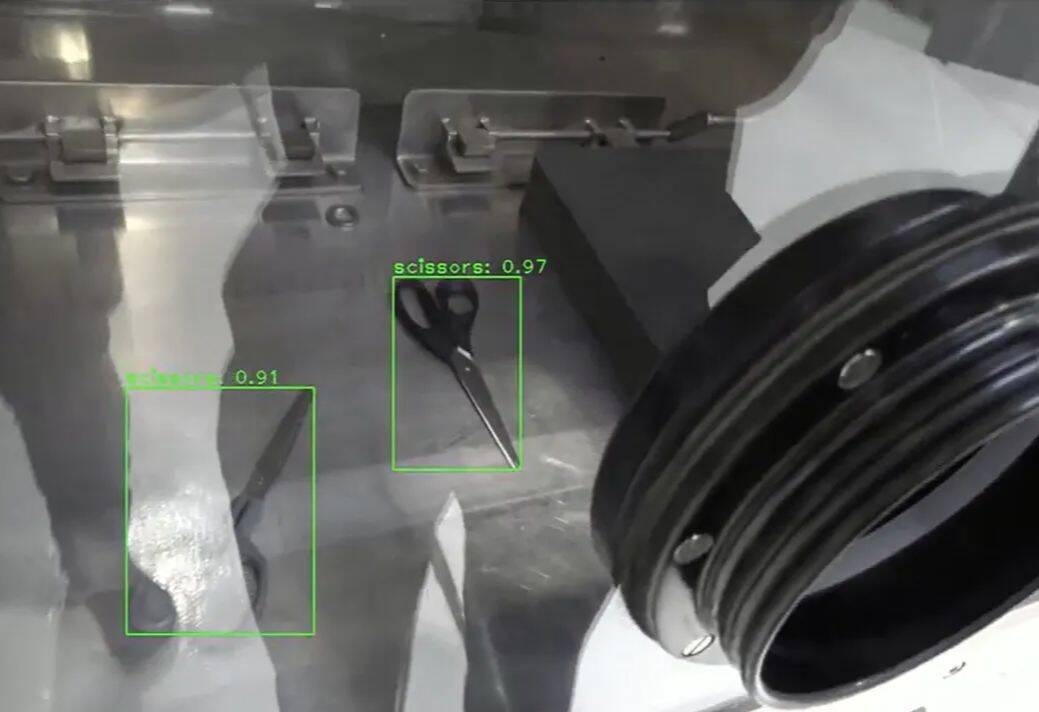
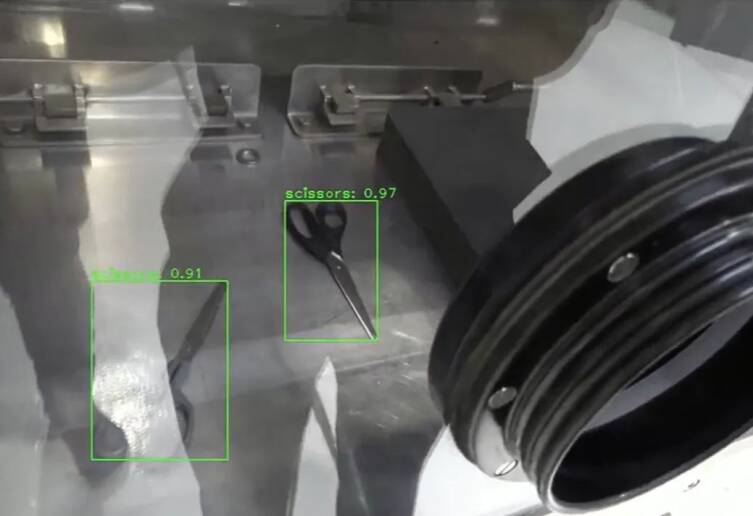
An existing object detection algorithm was chosen to build on, which included a dataset of common sharp objects, like scissors and knives. A second dataset was built around a list of commonly encountered sharp industrial objects. The images for training the algorithm were collected from gloveboxes, in a range of lighting conditions, to make the model as robust as possible.
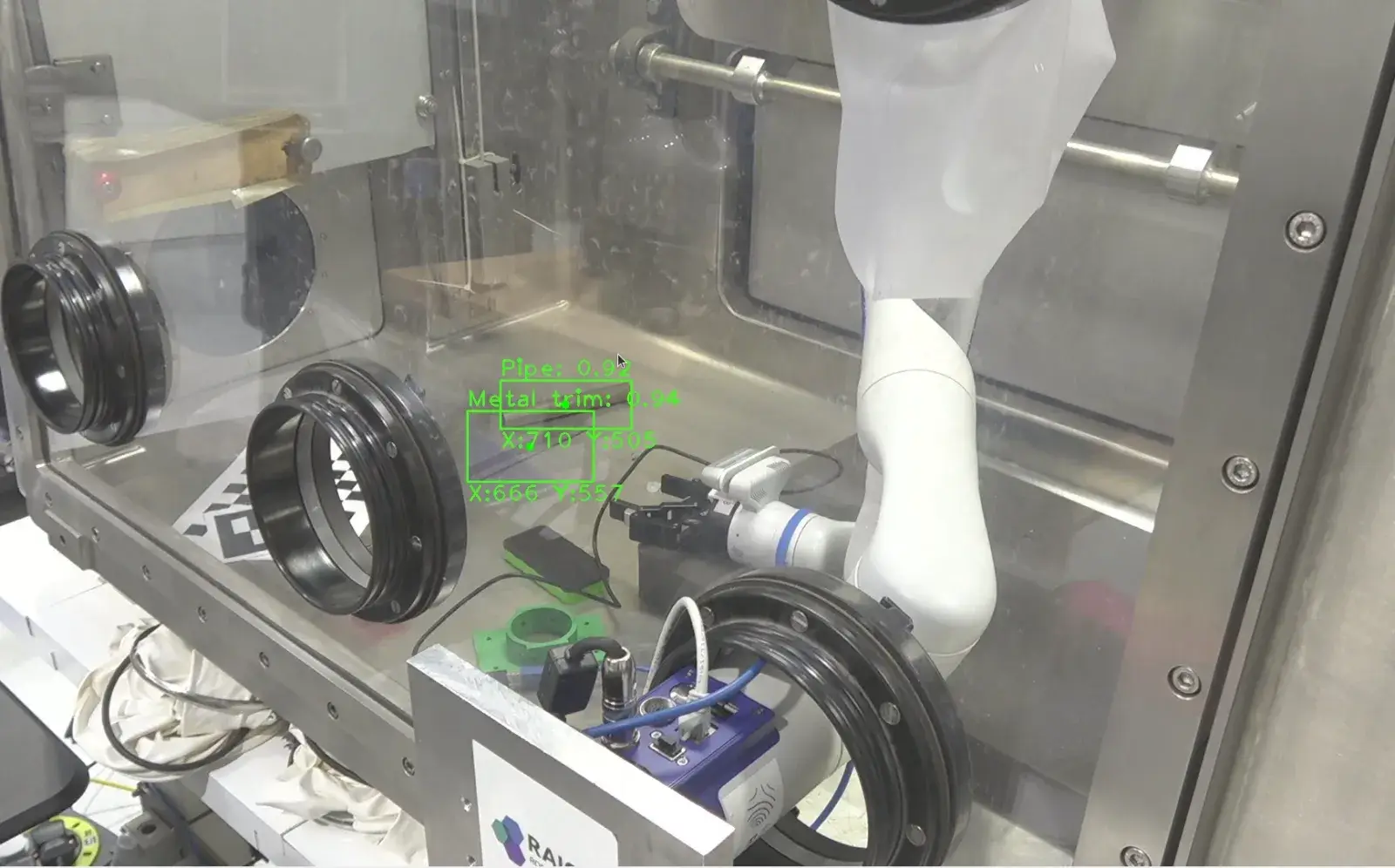
In March 2025, the object detection model was implemented into the manipulator control system in a glovebox mock-up for demonstration.
The demonstration detected sharp objects and created a virtual no-go zone around these items to prevent the manipulator from making contact or damaging its glove.
This first model was a prototype with a real world application. The wider purpose was to develop a model for object detection, which sets the foundation for a much broader range of complex uses, and could eventually pave the way for full automation.
Future use cases include preventing teleoperated or automated robotic equipment from going near anything that might pose a risk, collecting objects for disposal, and grasping and manipulating objects within the glovebox. This could make critical activities, like post operational clean out or sample preparation, much safer and efficient. Next steps are currently being explored by the team and end users at RAICo.
Craig West, a Robotics Engineer at UKAEA, said:
“This initial project solves a real life challenge that our partners at Sellafield Ltd presented to us, but it also paves the way for a wide range of glovebox autonomy possibilities. We are excited to hear from RAICo partners about their glovebox challenges and work with them to take this work to the next level”.
To contact the team about the project, or explore potential use, contact RAICo’s Head of Technology, Salvador Pacheco-Gutierrez, via enquiries@raico.org.
An Object Detection Model Paves the Way for Autonomous Gloveboxes
In a recently completed project, RAICo took the first steps towards creating a sharp object detection system to help prevent damage to robot manipulators in golveboxes.
The team began by developing a realistic representation of a through-gloveport robotic system at RAICo1. Although the setup was technology agnostic, it included mirroring elements of Sellafield’s RrOBO (Risk Reduction of Glovebox Operations) system to ensure reflection of real-world problems. The project presented many challenges, one of which was Sellafield’s use of external camera on the RrOBO system, which meant there was no fixed relationship between the camera and the manipulator’s position.
An existing object detection algorithm was chosen to build on, which included a dataset of common sharp objects, like scissors and knives. A second dataset was built around a list of commonly encountered sharp industrial objects. The images for training the algorithm were collected from gloveboxes, in a range of lighting conditions, to make the model as robust as possible.
In March 2025, the object detection model was implemented into the manipulator control system in a glovebox mock-up for demonstration.
The demonstration detected sharp objects and created a virtual no-go zone around these items to prevent the manipulator from making contact or damaging its glove.
This first model was a prototype with a real world application. The wider purpose was to develop a model for object detection, which sets the foundation for a much broader range of complex uses, and could eventually pave the way for full automation.
Future use cases include preventing teleoperated or automated robotic equipment from going near anything that might pose a risk, collecting objects for disposal, and grasping and manipulating objects within the glovebox. This could make critical activities, like post operational clean out or sample preparation, much safer and efficient. Next steps are currently being explored by the team and end users at RAICo.
Craig West, a Robotics Engineer at UKAEA, said:
“This initial project solves a real life challenge that our partners at Sellafield Ltd presented to us, but it also paves the way for a wide range of glovebox autonomy possibilities. We are excited to hear from RAICo partners about their glovebox challenges and work with them to take this work to the next level”.
To contact the team about the project, or explore potential use, contact RAICo’s Head of Technology, Salvador Pacheco-Gutierrez, via enquiries@raico.org.